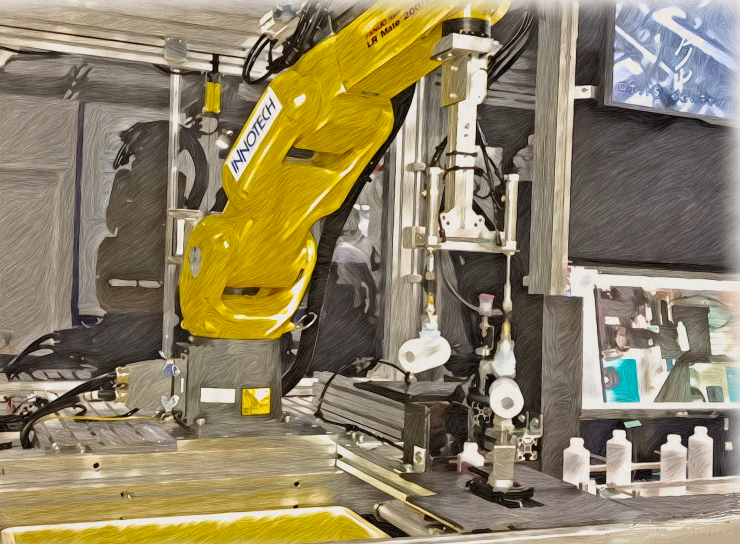
高速バラ積みピッキングロボットは、主に工場での連続的な機械装置への供給作業で使用される自動化システムの一種です。このロボットは、ランダムに置かれた商品を箱から個別にピッキングして、次工程の装置に供給する作業を行います。主に製品・部品をコンベヤに整列させたり、容器を充填機に供給したり、袋入り部品を包装機に供給する作業を行います。

ロボットが容器や袋を扱う際には、それぞれの特性や取り扱い方法に適したアプローチが必要となります。特に、袋の場合は柔軟性や形状の変化に対応するための特別な技術やアルゴリズムが必要となる場合があります。
1.取り扱い方法の違い: 容器は通常、固定された形状を持ち、取り扱いが比較的容易です。一方、袋は柔軟な素材であり、形状が変化する可能性があるため、取り扱いがより難しい場合があります。
2.グリップや掴み方の違い: 容器は、ロボットが適切なグリップや掴み方を使用して容易に取り扱うことができます。一方、袋は柔らかい素材であり、適切なグリップや掴み方を選択する必要があります。袋の形状や素材によっては、適切なグリップを見つけることが難しい場合があります。
3.重量と安定性の違い: 容器は通常、丸みを帯びているため不安定な特性を持っており、ロボットが持ち上げるには工夫が必要です。一方、袋は軽量であり、形状や素材によっては安定性が低く、取り扱いがより難しい場合があります。
人工知能(AI)を搭載したロボットシステムは様々な状況やタスクに適応し、柔軟に作業を実行する能力を持つことができます。
状況認識: AIを用いたロボットは、センサーやカメラなどの情報を取得し、周囲の状況をリアルタイムで認識します。このため、環境や作業条件が変化しても、ロボットはその変化を検知し、適切な対応を行うことができます。
学習能力: AIを搭載したロボットは、経験やデータから学習し、新しいタスクや状況に適応することができます。例えば、特定の作業パターンや動作を学習し、それに基づいて作業を実行することが可能です。
自己調整能力: AIは、ロボットの動作やパラメータを自動的に調整し、最適な作業状態を維持します。例えば、作業の効率を最大化するために、動作速度や力の調整を行うことがあります。
柔軟性と多機能性: AIを搭載したロボットは、複数の異なる商品パターンや作業に対応する柔軟性を持ちます。1つのロボットが複数の作業をこなすことができるため、生産ラインの柔軟性や効率性が向上します。
以上のように、AIでフレキシブルに作業するロボットは、変化する状況や要求に迅速に対応し、効率的な作業を実現することができます。

テストソリューション本部
TEL:045-474-8824