ピッキングロボットセルは、工場や倉庫で行われるピックアンドプレイス作業の自動化システムです。ロボットアームを利用して、製品や商品をピッキング(持ち上げて取る)する作業を自動化します。"セル"という用語は、ピッキング作業を自動化するためのロボットシステムをパッケージ化したユニット単位を指します。セル化することによるシステムの統一化で管理運用がしやすくなります。

ピッキングロボットを構築することは、専門知識と経験を要する技術的な挑戦が伴います。
ロボット工学、機械学習、ビジョンシステムなどの幅広い技術領域の知識が必要です。特にロボットの正確な制御や高度な画像処理による物体の認識、効率的なハンドの開発などの技術的な課題があります。またロボットシステムは複数の機械やシステムが統合されたものであり、それらを効果的に動作させるためには、統合作業や各要素の調整が必要です。これにはソフトウェア開発やハードウェアの配置などが含まれます。
弊社ではピッキングラボでの実験結果を元に、お客様へ最適なピッキングスタイルをご提案しております。
工場でのロボットピッキングは、製造プロセスの効率化や自動化を実現するための重要な技術です。例えば、自動車組立ラインでは特定の部品が必要になる時に、ロボットがその部品を取り出し、組み立て作業に供給します。
商品の出荷のためのピッキングが典型的な例です。ピッキングした商品を梱包したり、しわけ用のシステムに投入したりします。返品作業の場合もあります。
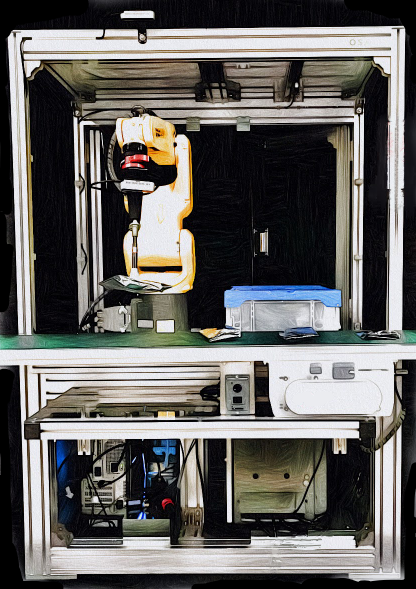
ピッキングロボットセルの構成は、その目的や使用環境によって異なりますが、一般的な構成要素は以下の通りです。
ロボットアーム: 物体をつかむための多関節ロボットアームが中心となります。これは、作業範囲や積載能力などの要件に応じて選択されます。
エンドエフェクター: ロボットアームの先端に取り付けられ、物体をつかんだり操作したりするためのいわゆる”ハンド”です。例えば、チャックタイプや吸着タイプなどがあります。
ビジョンシステム: 物体を認識し、正確に位置を把握するためのカメラやセンサーが含まれます。これにより、ロボットが物体を適切にピッキングすることが可能になります。
制御システム: ロボットアームやビジョンシステムを制御するソフトウェアや制御装置です。これによりシステム全体を制御します。
安全システム: 作業環境での安全性を確保するためのセンサーや安全装置が組み込まれています。例えば、障害物検知センサーや緊急停止ボタンなどがあります。
コンベア連携:ピッキングロボットセルとコンベアは、連携して効率的な生産や物流プロセスを実現するために重要な役割を果たします。業界や用途に応じて、さらに様々な機能や装置が追加されることがあります。
これらの構成要素が組み合わさり、ピッキングロボットセルが形成されています。
ピッキングロボットセルは、製造業における部品の取り扱いや組み立て作業、倉庫における商品のピッキングや梱包作業など、さまざまな場面で活用されています。
これによって、生産性の向上や人間の労働負荷の軽減などの効果が期待されています。

テストソリューション本部
TEL:045-474-8824